Interface Design 1
Xtend
Gestaltungsthema dieses Kurses, war das Entwickeln eines Controllers für einen Jenga Roboter. Dabei ging es vor allem darum, einen Controller zu Entwickeln, der von den typischen Gestaltungs-/ und Interaktionskonzepten abweicht und eine alternative Herangehensweise darstellt.
Erste Ideen
Zu Anfang haben wir als Gruppenmitglieder jeweils verschiedene Ideen und Gedanken zu möglichen Controllerkonzepten festgehalten und ausgetauscht. Durch die unterschiedlichsten Erfahrungen in der Nutzung von Controllern im Alltag und Gamingbereich innerhalb der Gruppe entstanden vielseitigste Ideen. Diese haben wir anschließend innerhalb der Gruppe diskutiert.

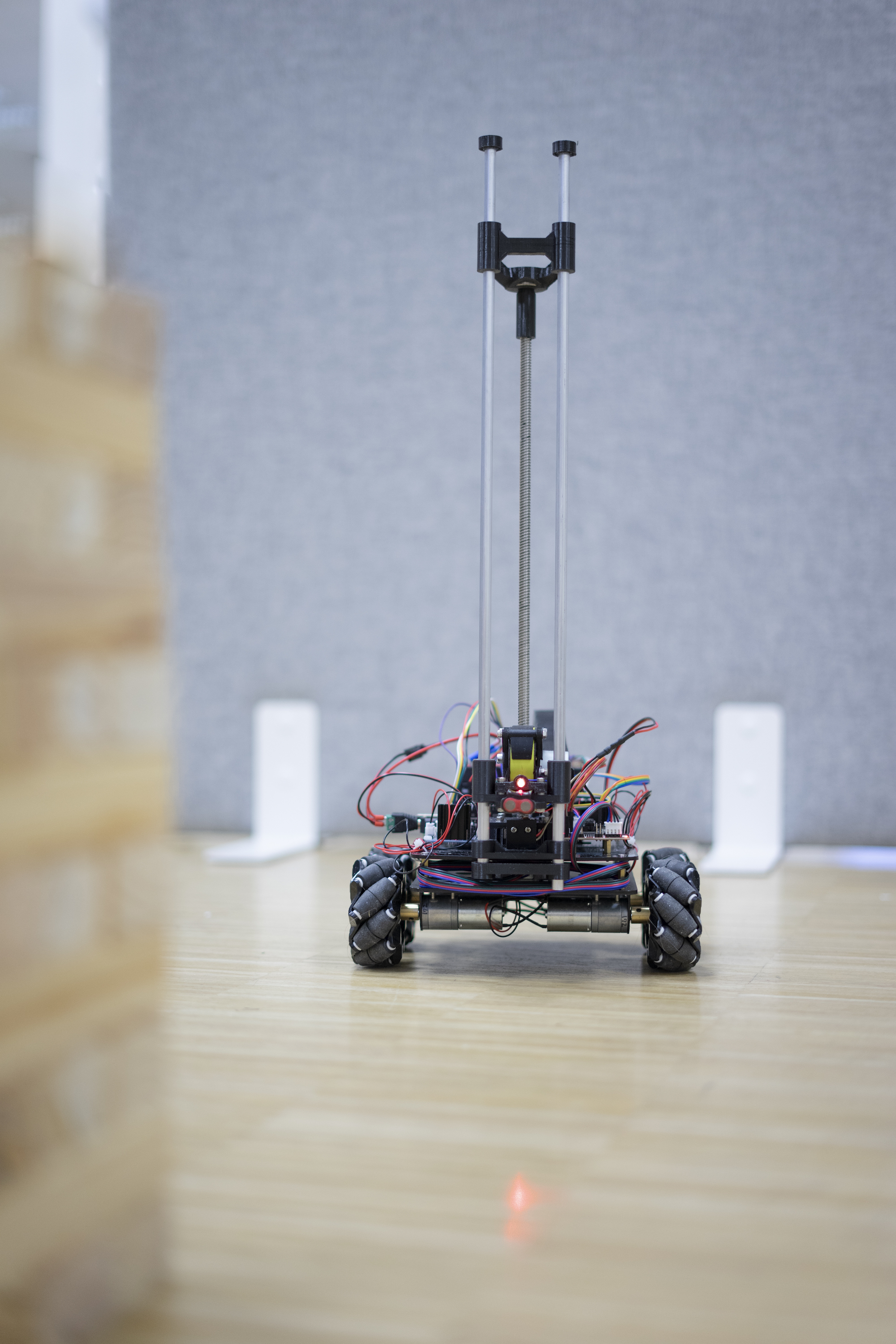
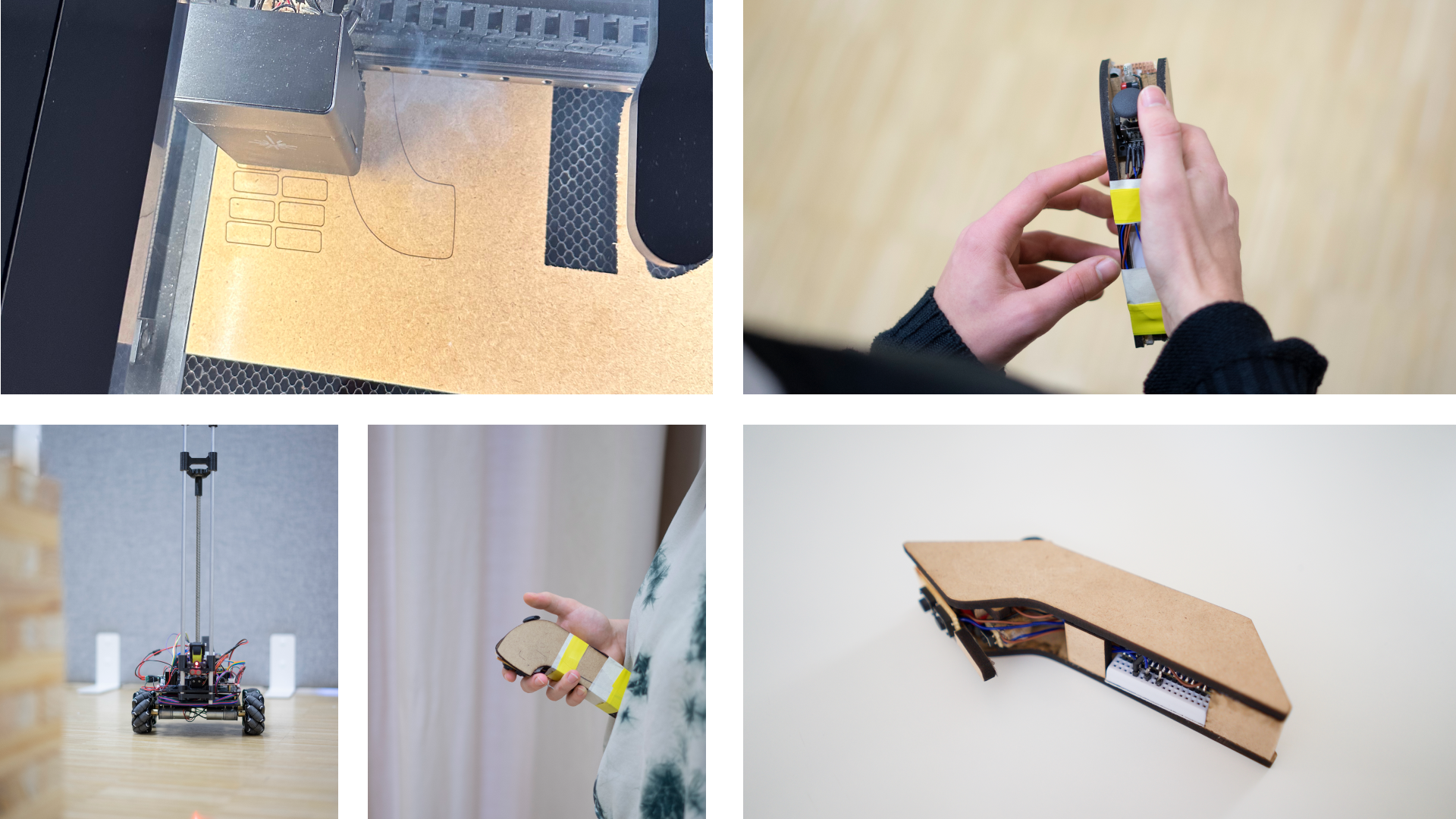
Bau des Prototypen
Für das anstehende Usability Testing haben wir einen Funktionsprototypen entwickelt, mit dem sich der Roboter steuern lässt. Zunächst haben wir unser Arduino-Kit verwendet um alle Buttons, sowie den Joystick und unseren Xtendbutton an ein Arduino-Nano Board anzuschließen. Parallel dazu haben wir ein Gehäuse aus Holz gebaut, in welches wir diese Buttons zu einem späteren Zeitpunkt eingebaut haben. Dann haben wir mithilfe einer Arduino-Library die Funktionen des Roboters in unseren Controller implementiert, sodass wir alle Freiheitsgrade des Roboters mit unserem Controllers steuern konnten. Außerdem haben wir ein Ergonomiemodell gebaut, um dieses später ebenfalls in unserem Usability Testing zu testen.
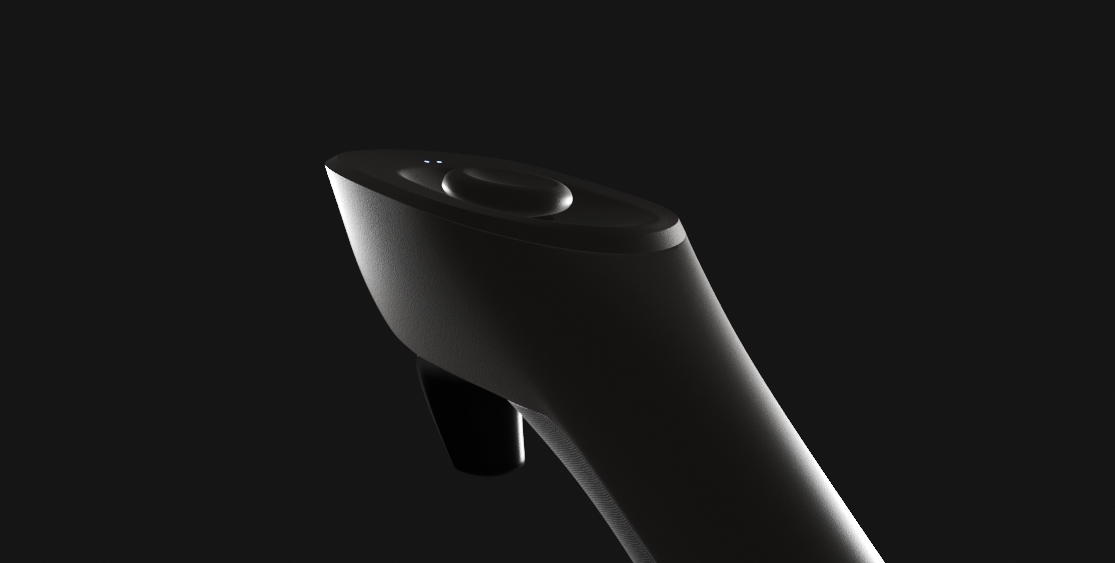
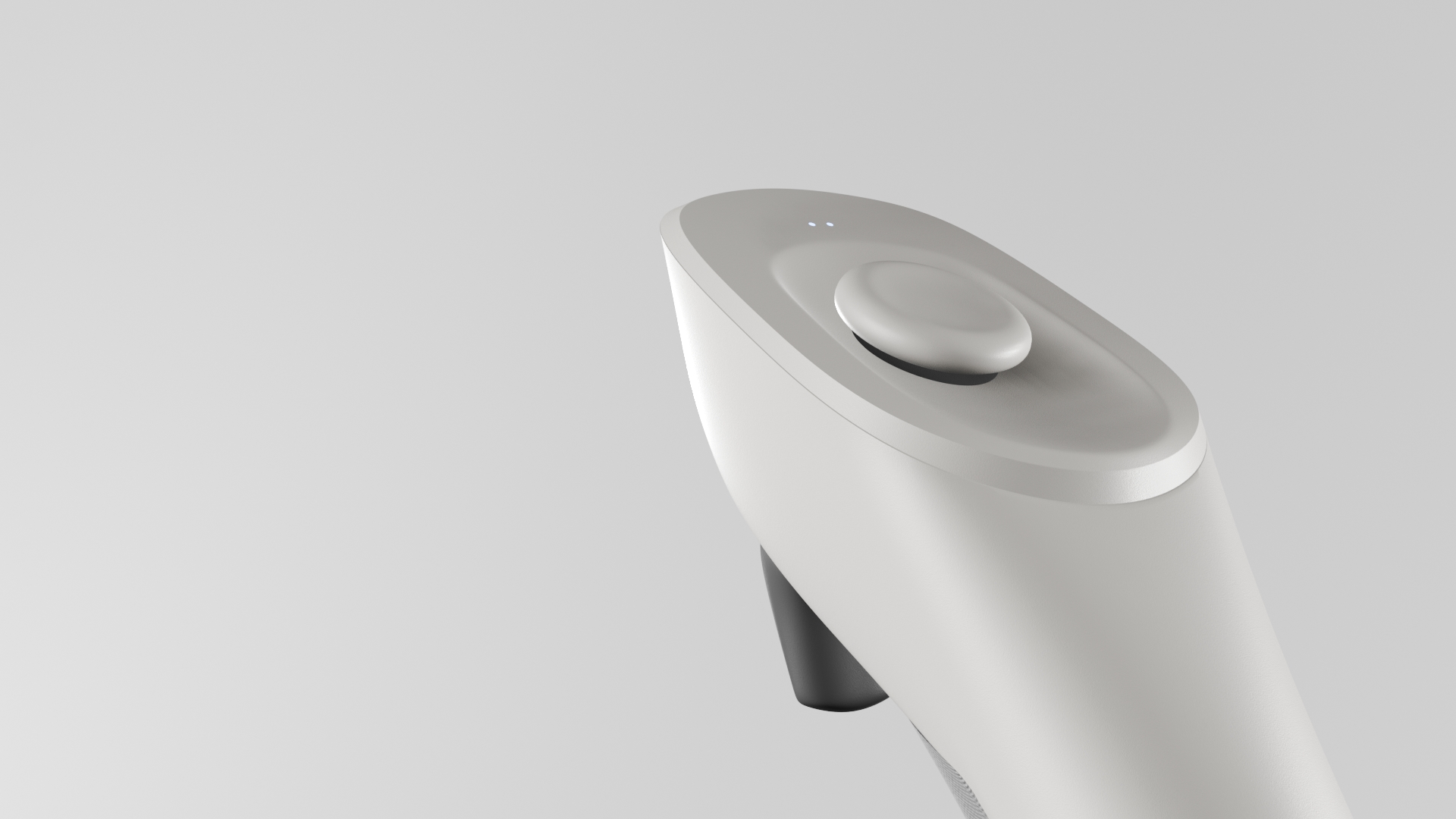
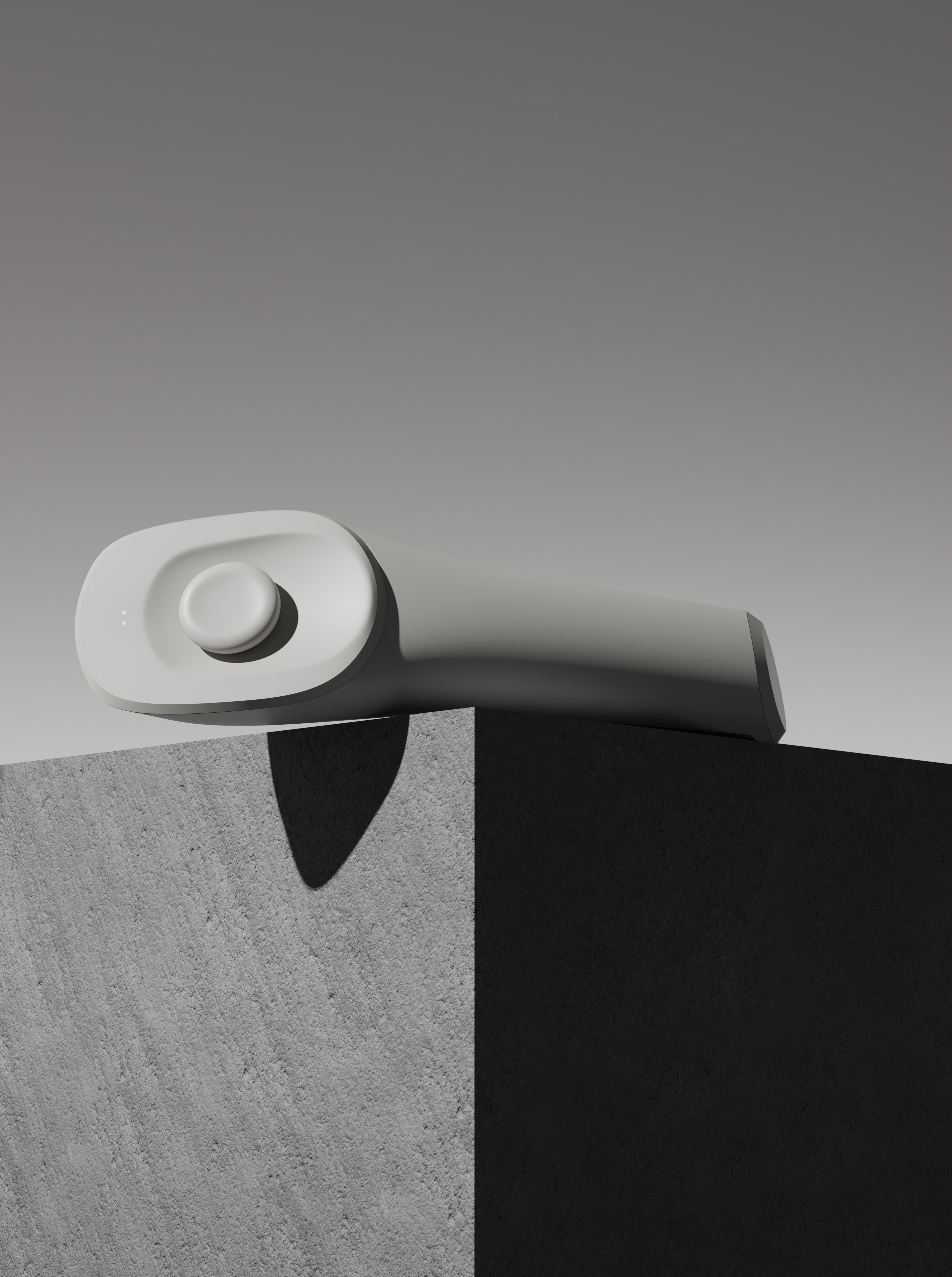
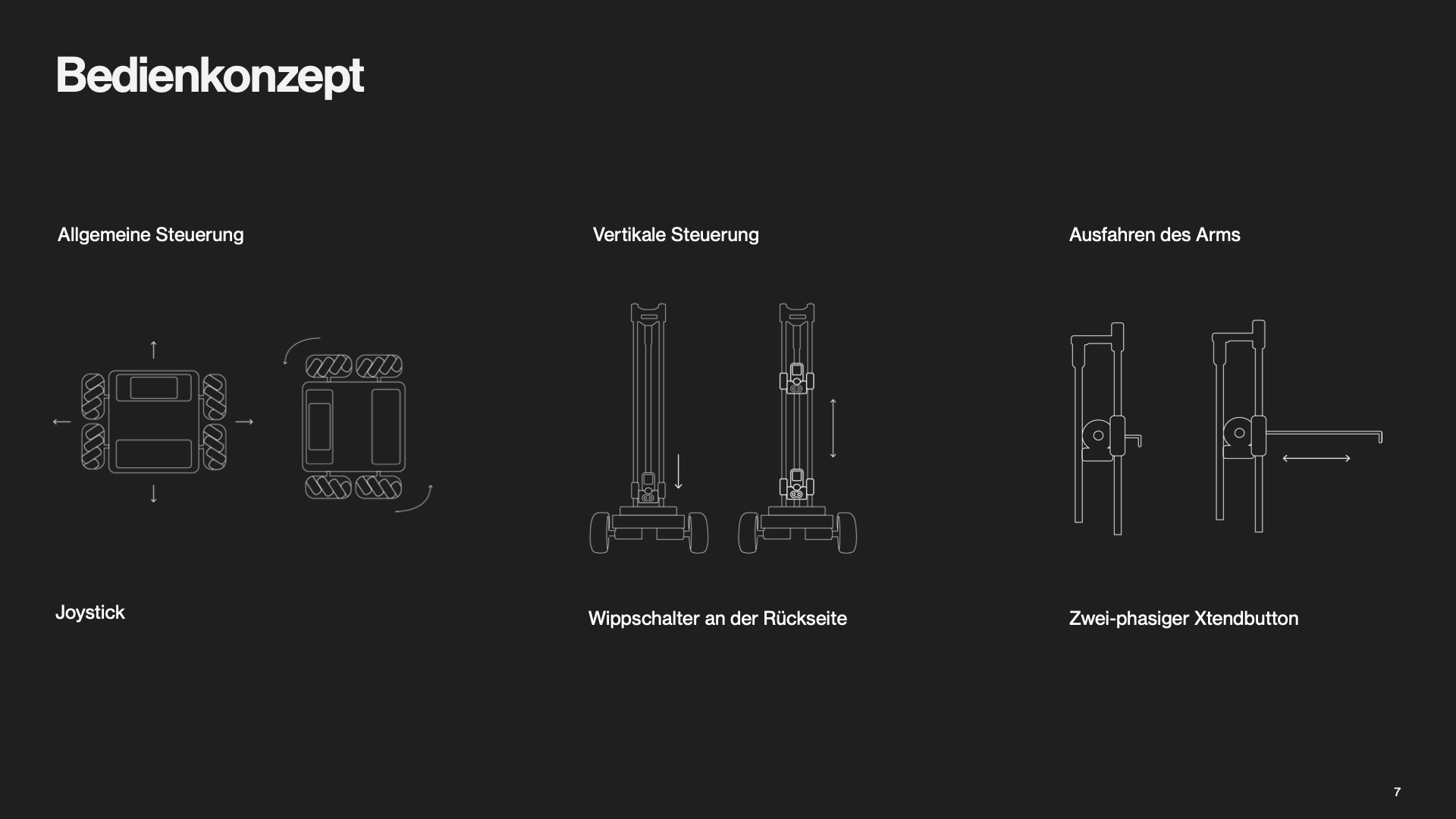
Xtend Button

Dieser Button stellt das Herzstück unseres Controllers da. Wir haben uns hierfür bei einem Kameraauslöser inspiriert. Unser Xtend Button hat zwei Stufen, d.h man kann ihn leicht ziehen wordurch dieser einmal einrastet und der Laser des Roboters aktiviert wird. Zieht man den Xtendbutton bis zur zweiten Stufe weiter, fährt der Arm des Roboters aus. Lässt man den Xtend Button bis zum ersten Anschlag los, bleibt dieser in der Position stehen, erst wenn man diesen Button vollständig loslässt, fährt der Arm vollständig in seine Ausgangsposition zurück.
Julia Zoellner, Amelie Schlueter, Tim Bluthardt
BetreuungProf. Michael Schuster, Prof. Carmen Hartmann-Menzel
VeröffentlichungWintersemester 2023 / 24
Tags