Prototyping
dolly

Ein motorisierter Kamerawagen mit Pan & Tilt, gestaltet für individuelle Kamerafahrten.
dolly ist ein einzigartiges Projekt das Einsteiger und Pro User gleichermaßen die Möglichkeit verleiht ihre eigenen Kamerafahrten durchzuführen.
Unser Kamerawagen mit Gimbel ist eine Neugestaltung der bereits existierenden Kamerawagen auf dem Markt, jedoch besonders, da er sich über Code steuern und verändern lässt.
Die Inspiration zu dolly wurde durch Marques Brownlee (Youtuber) ausgelöst. Dieser veröffentlichte ein Video zu KIRA, einem innovativen high speed Kamera Roboter.
Unsere Intension war es im kleinen Stile einen ähnlichen Kamera Roboter zu bauen, der von Studenten im Fotostudio zur Aufnahme und Fotografie ihrer Projekte genutzt werden kann. Damit entstand die Idee von dolly.
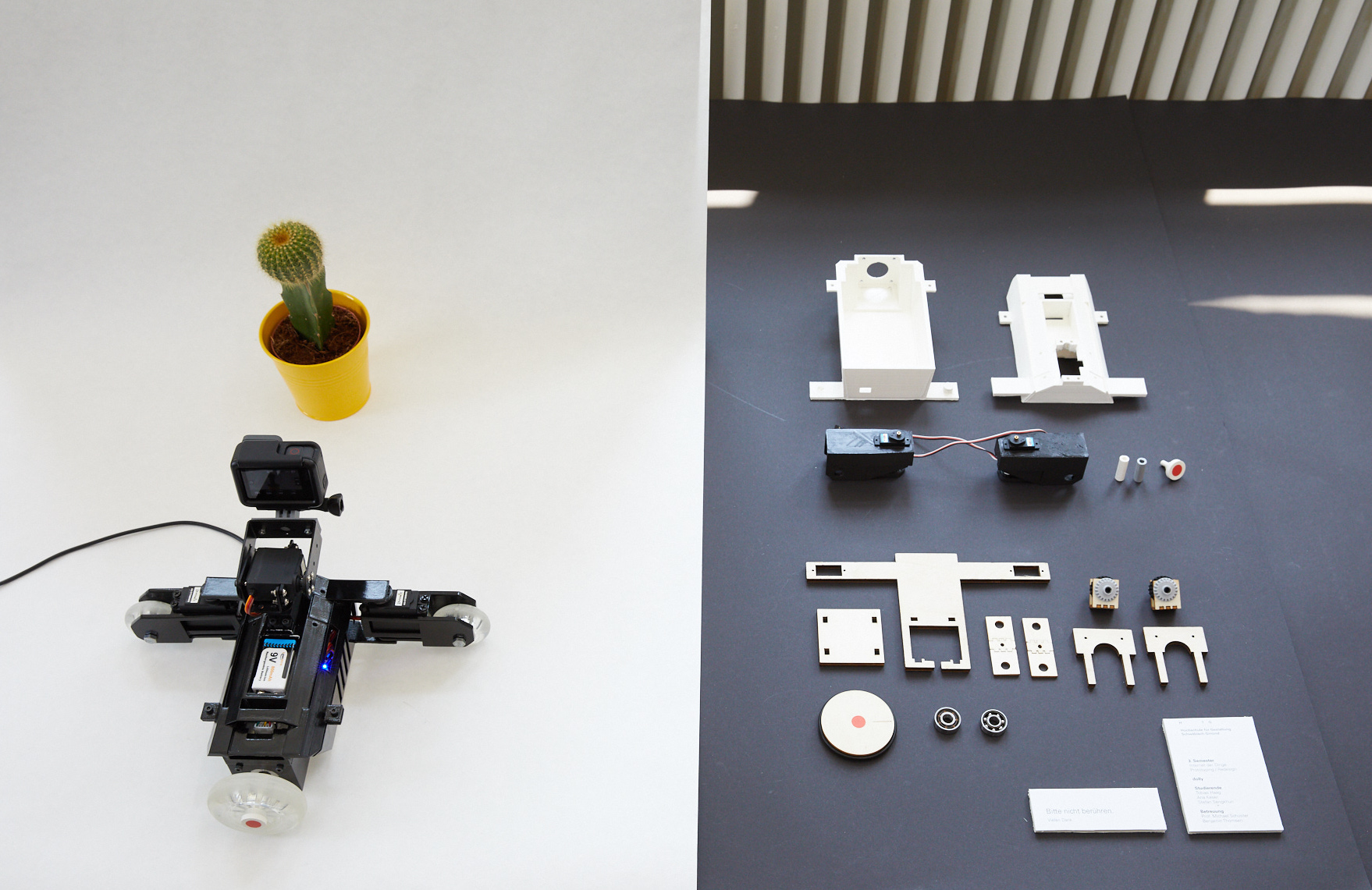
Die Entwicklung von unserem Kameradolly durchlief zwei Prototypen bis zur seiner jetzigen Gestalt und Funktionalität. Der finale dolly besteht aus den folgenden zwei Einheiten: Kamerawagen und Kameragimbel.
Unser Team entwarf einen dreirädrigen Wagen, der über ein antreibendes Rad mit einem Schrittmotor beschleunigt wird. Die beiden vorderen richtunggebenden Räder werden über Servomotoren gesteuert. Der zweitteilige Körper des Wagens wurde komplett über ein 3D-Programm aufgebaut und 3D gedruckt. Für einen möglichst geringen Rollwiderstand und eine komfortable Laufruhe des Wagens nutzten wir Design-Lenkrollen als Räder.
Das Gimbel bestehend aus Pan&Tilt ist über eine Halterung mit der Kamera, in unserem Fall eine GoPro, verbunden und steuert über zwei Servomotoren die vertikale und horizontale Kamerarichtung.
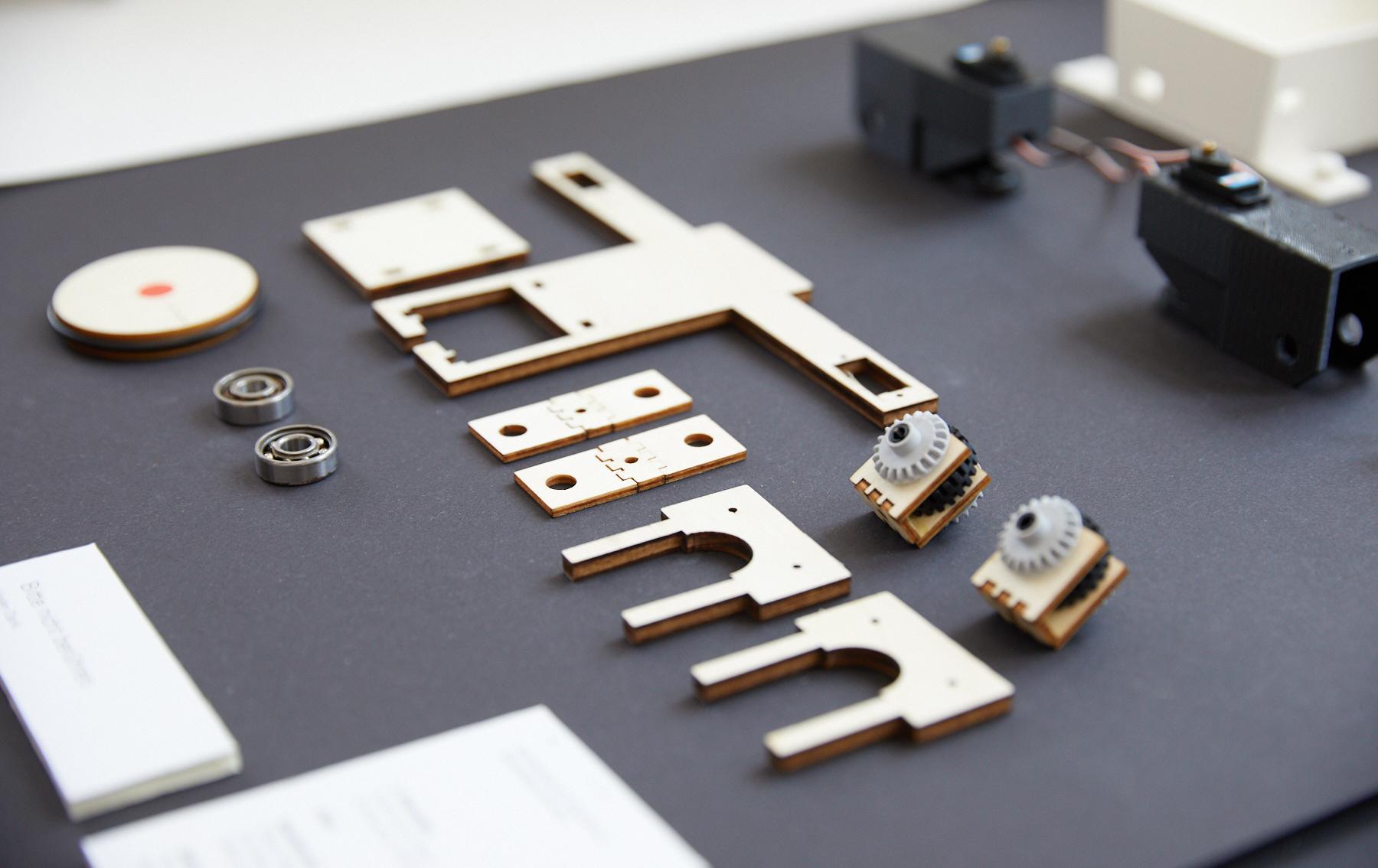
Die Elektronik bestehend aus auf Platinen gelöteten Bauteilen befindet sich im Korpus des Wagens. Damit dolly auch portabel einsetzbar ist wurde die gesamte Elektronik auf den Akkubetrieb ausgelegt.
Hinsichtlich der Programmierung der elektronischen Modulen wurde diese durch verschiedene Libraries in Arduino gelöst. Es wurden Libraries für Easing verwendet, eine im Kamerabereich übliche Bewegung, um diese auf Schrittmotoren und Servomotoren mechanisch zu adaptieren.
Damit der User über WLAN mit dolly interagieren kann, entschieden wir uns für eine lokale Netzwerkverbindung zwischen einer GoPro und einem MKR1000 Mikrocontroller von Arduino. Über das WLAN der GoPro verhält sich der MKR1000 als Webserver, auf dem im Hintergrund die Fahrten über Code hinterlegt sind. Über die Verbindung mit einem Wifi fähigen Gerät können nun über die HTML Schnittstelle einzelne Fahrten ausgewählt werden.
Dadurch kann dolly über ein lokales Netzwerk ganz ohne weiteren Access Point, Hotspot oder Mobile Daten betrieben werden.
Da für das Konzept des Projekts eine Web-App vorgesehen war, wurden dafür Wireframes und Screendesigns angefertigt. In unserem UX-Flow kann der User zwischen Standard- und Pro Modus wählen. Der User erhält eine Übersicht über vorgegebene Standartfahrten mit detaillierten Informationen und Beispielvideos. Nach der Auswahl kann der Nutzer den Kamerawagen, Pan/Tilt, Kamerabild und optional eine Testfahrt anpassen. Dabei soll eine Live Anzeige den User bei der Anpassung unterstützen. Anschließend kann eine aufgenommene Fahrt gespeichert und somit jederzeit dupliziert werden.
Im Standartmodus, auf dem in unserem Prototypen der Fokus lag, werden 6 verschiedene Fahrten angeboten. Der Pro Modus ist bisher rein konzeptuell und noch nicht prototypisch umgesetzt.
Für die Ausstellung wurde dolly mit Klavierlack aufbereitet um den im Kamerabereich qualitativ hochwertigen Look zu verpassen. Außerdem wurde zudem ein passendes Ausstellungsdesign mit selbst gestaltetem Reprotisch und einem Platz für Videoschnitt inszeniert.

dolly soll als DIY und Open Source Projekt angeboten werden, damit auch andere Studenten und Maker auf das Projekt aufmerksam werden.
Das Team hinter dolly wird zeitnah das Projekt auf Instructables veröffentlichen.
„Wir sind schon ganz gespannt auf deine kreative Umsetzung von dolly und die coolen Fotos und Videos, die du damit machst ;)”
Fotos: Oliver Jung
Tobias Haag, Ana Keser, Stefan Sengkhun
BetreuungProf. Michael Schuster
VeröffentlichungSommersemester 2018
Tags