Technische Grundlagen 2
Remote Gardening
Thema
Wer kümmert sich um meine Pflanzen, wenn ich nicht zuhause oder im Urlaub bin? Damit die eigenen Pflanzen immer gesund und optimal bewässert sind, wurde das Projekt Remote Gardening entwickelt: Das smarte Beet von überall steuerbar und mit Freunden vernetzt.
Aufbau
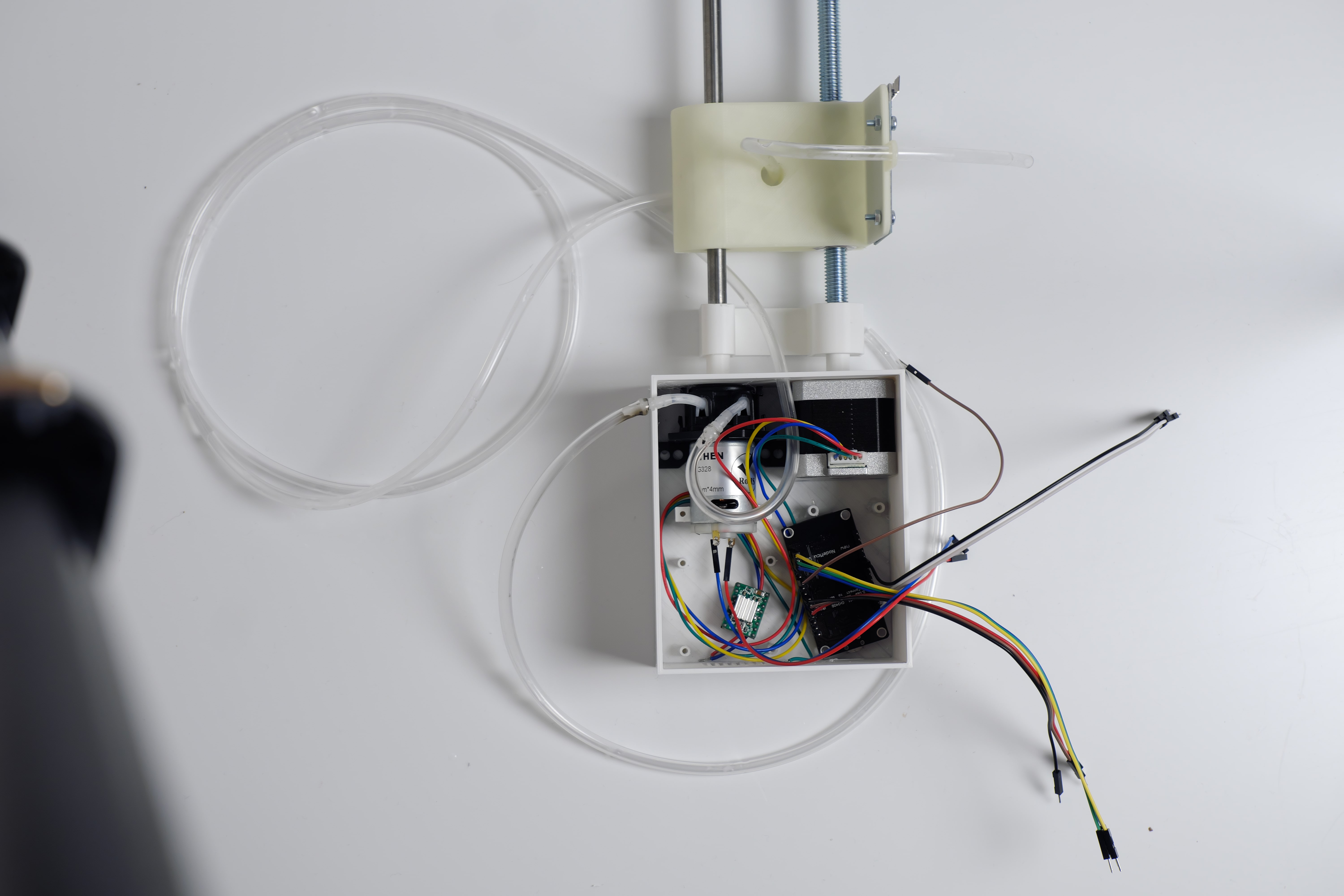
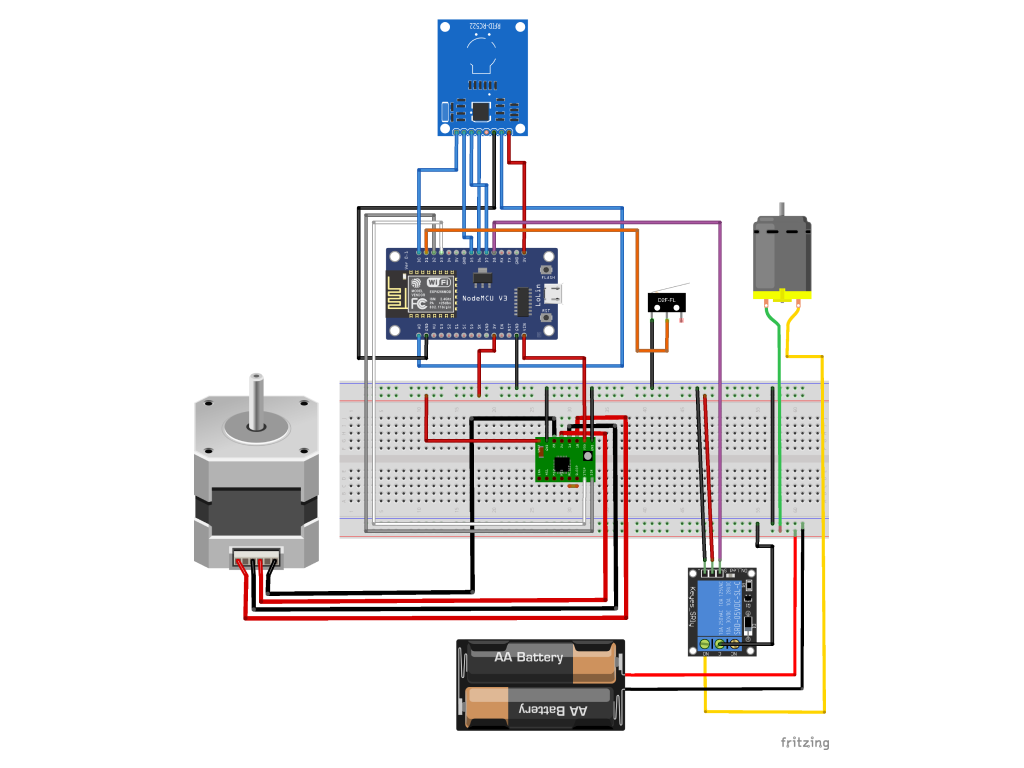
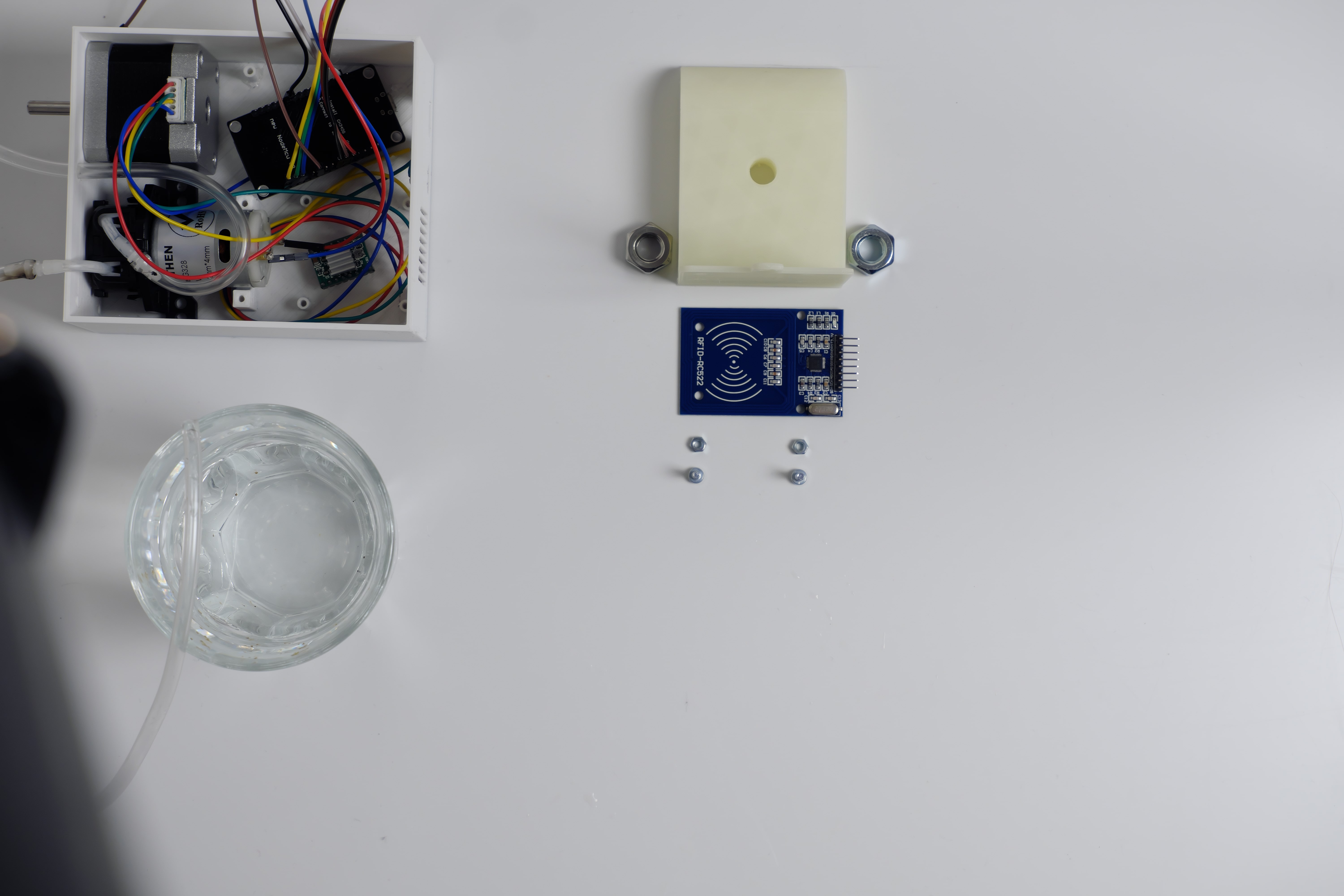
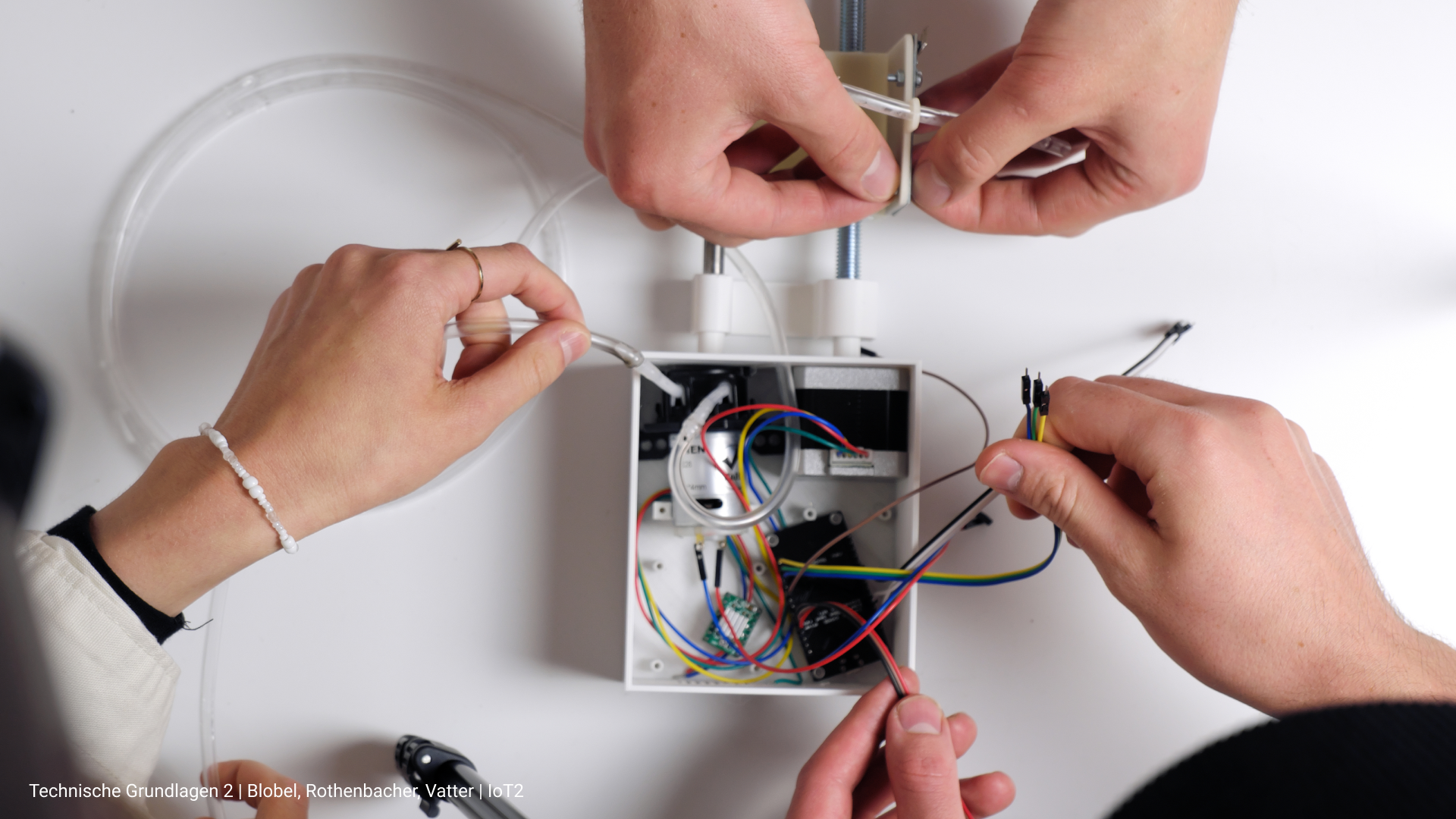
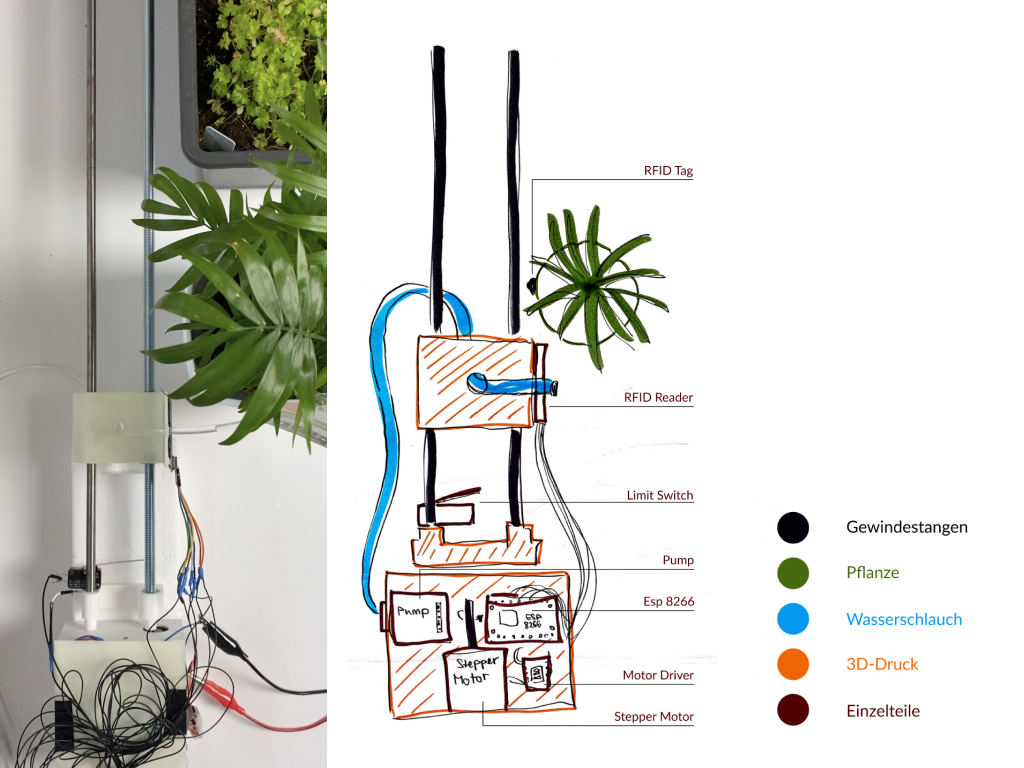
Remote Gardening besteht aus einem Grundgerüst mit einer Gewinde- und Stahlstange, welche mit 3D gedruckten Teilen zusammengesteckt werden können. Die Gewindestange wird von einem Stepper Motor angetrieben, damit sich das darauf befestigte Objekte fortbewegen kann. Am Anfang der Gewindestange ist ein Endschalter angebracht, der eine Referenzfahrt zulässt und die Fahrt somit kalibriert werden kann. Auf dieser geraden Bahn läuft ein ebenfalls 3D gedruckter Schlitten. An seiner Vorderseite ist ein RFID-Reader befestigt und durch eine Öffnung am Boden des Schlittens kann ein Schlauch geführt werden, mit dem die Pflanzen gegossen werden können. Nun muss ein Blumentopf mit einem daran befestigten RFID-Tag, in Form von einem weißen Kleber, an das Grundgerüst gestellt werden. Immer dann, wenn der RFID-Reader einen solchen RFID-Tag erkennt, pausiert der Stepper Motor und die Gewindestange und der Schlitten bleiben stehen. Dann wird durch den Schlauch, mithilfe einer peristaltischen Pumpe, Wasser in den Blumentopf gepumpt. In einer 3D gedruckten Box, die am einen Ende der Gewindestange angebracht ist, befindet sich das ESP-Board, die peristaltische Pumpe, der Stepper Motor, ein DC 5V Delay Modul und ein Stepper Motor Driver.
Backend
Das Backend ist mit der Datenbank MongoDB verbunden und speichert dort alle hinzugefügten Pflanzen ab. Auch geänderte Werte werden dahin übertragen, damit sie im Frontend immer dargestellt werden können. Jede Pflanze ist mit ihrer eigenen RFIDUID gekennzeichnet und darüber wiederzufinden.
Zwei Mal am Tag wird der Stepper Motor angetrieben und der Schlitten auf der Bahn bewegt. Dabei liest der RFID-Reader alle Tags aus und prüft, ob es die RFIDUID schon in der Datenbank gibt und wenn, ja wie oft sie gegossen werden muss. Daraufhin wird die peristaltische Pumpe gestartet und bewässert so lange die Pflanze, wie in der Datenbank definiert.
Das Repository findet man unter folgendem Link auf GitHub: https://github.com/hfg-joschua-r/RemoteGardeningTG2/tree/Stable
Frontend
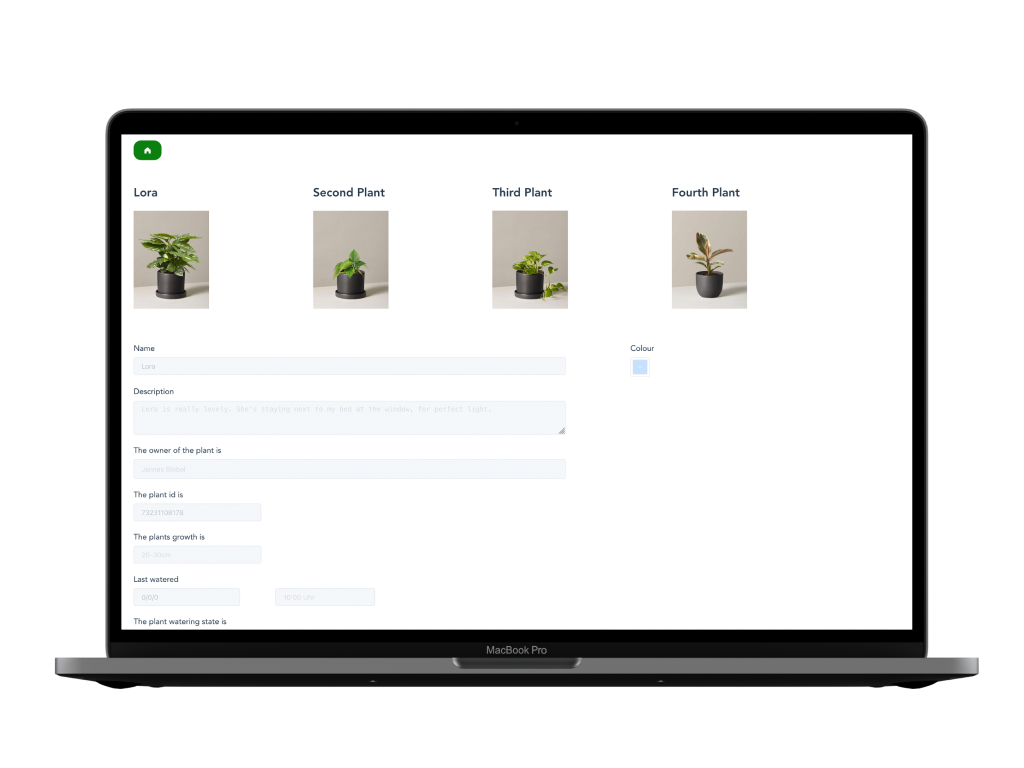
Das Frontend enthält eine Homeansicht, die alle hinzugefügten Pflanzen in der realen Anordnung zeigt. Man öffnet die Overviewseite einer Pflanze, in dem man auf eine beliebige Pflanze auf der Homeseite klickt. Dort können alle spezifischen Informationen zur Pflanze selbst und Informationen über den Bewässerungsprozess, wie zum Beispiel den zuletzt gewässerten Zeitpunkt, eingesehen werden.
Der Nutzer kann eine Pflanze nur hinzufügen, wenn er den neuen RFID-Tag an der neuen Pflanze vom RFID-Reader erfassen lässt und erkannt wird, dass es diese RFIDUID in der Datenbank noch nicht gibt. Dann empfängt der Nutzer eine Email von remotegardening@gmail.de und kann dort mit einem weiterführenden Link zum Frontend gelangen. Dort kann dann die neue Pflanze angelegt und definiert werden.
Fabienne Vatter, Joschua Rothenbacher, Jannes Blobel
BetreuungProf. Michael Schuster, Benjamin Thomsen
VeröffentlichungSommersemester 2021
Tags