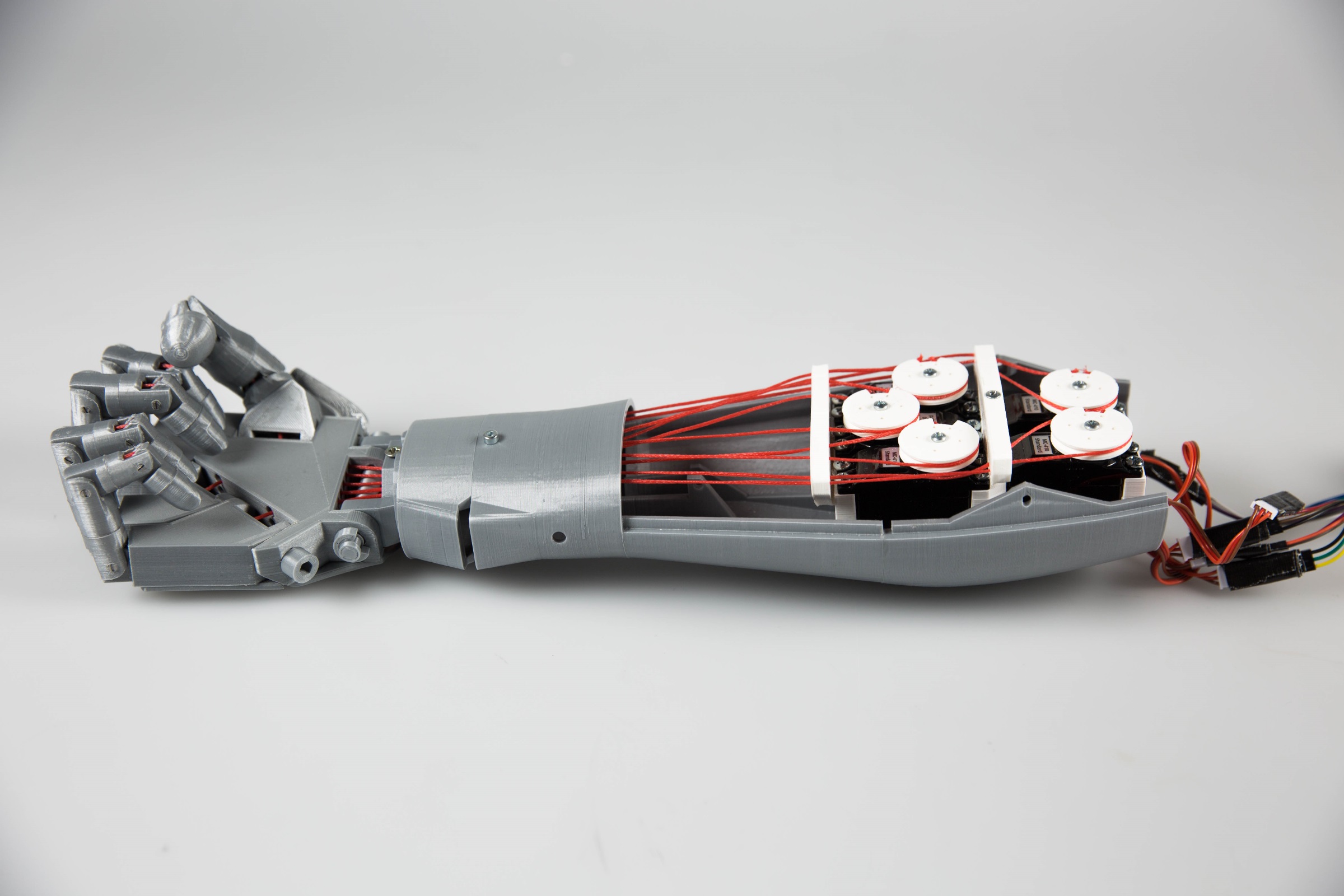
Im Rahmen des Kurses „User Research“ entstand ein Roboterarm, der die Bewegungen der Hand des Nutzers reproduziert. Zum Einsatz kommen hierbei, jeweils ein sogenannter Flexsensor per Finger, welche an einem Handschuh befestigt wurden. Deren variabler Widerstand wird, für die Ansteuerung der Servomotoren in dem Roboterarm, in einen Bereich von 0 bis 90 Grad umgerechnet. Sowohl die Steuerung der Roboterhand, als auch das Erheben der Messdaten des Handschuhs, übernehmen jeweils WiFi fähige Mikrocontroller. Diese kommunizieren über UDP, um einen möglichst schnellen Datenaustausch zu ermöglichen. Dadurch konnten wir ohne Probleme eine Latenz von lediglich 20ms bei optimalen Bedingungen erreichen. Die Bewegung der Finger, wird mit jeweils zwei Schnüren erreicht, die an, auf den Servomotoren befestigten Scheiben, angebracht sind. Die Seile dienen als eine Art Sehnen und funktionieren wie Beuger und Strecker.
Das Modell des Armes wurde in Einzelteilen 3D-gedruckt und mit Schrauben zusammengebaut. Das Modell der Hand stammt von einem OpenSource Projekt namens InMoov. Die Stromversorgung des Mikrocontrollers des Handschuhs ist mit einer Powerbank gelöst, die für mehrere Tage genug Energie liefern kann. So kann eine vollständige Bewegungsfreiheit gewährleistet werden.