Prototyping
Grobot - Autonome Beetpflege
Grobot - autonomous urban farming
Im Rahmen des Projektes Prototyping/Redesign konstruierten wir den Gartenroboter „Grobot“, eine Komplettlösung für die Automatisierung des Urban Farmings. Sein mechanischer Aufbau besteht aus einem Scherenarm, der in einer zentralen Säule gelagert ist, die sich um ihre eigene Achse dreht. So ist der Roboter trotz seiner kompakten Ausmaße in der Lage, ein Beet von etwa 9m² Fläche zu bewirtschaften.
Grobot misst in regelmäßigen Abständen die Bodenfeuchtigkeit bestimmter Sektionen des Beetes, und passt das Gießwasser an Faktoren wie die Trockenheit des Bodens, das zu erwartende Wetter und besondere Bedürfnisse der Pflanzen an. Über eine Kamera erkennt er Unkraut, indem er die Position von erkannten Pflanzen mit denen der Nutzpflanzen abgleicht, die in seiner Datenbank gespeichert sind. Darüber hinaus bildet Grobot eine Plattform, auf Grundlage derer die Umsetzung einer Vielzahl weiterer Funktionen wie Krankheitserkennung oder Schädlingsbekämpfung möglich ist.
Konzept
Da es sich um ein Redesign handelte, orientierten wir uns an einem ähnlichen, bereits existierenden Produkt, dem Open Source Projekt „FarmBot“. Dieser Gartenroboter vollbringt mittels seiner austauschbaren Köpfe eine Vielzahl von Aufgaben, die weit über das Gießen und Unkraut jäten hinaus gehen. Dieser Kopf wird über ein System aus Schienen in Position gebracht, wodurch sich der Kopf in allen drei Raumachsen positionieren kann. Ähnliche Lösungen finden etwa auch in 3D-Druckern oder in CNC-Fräsen Anwendung, wo eine große Präzision unabdingbar ist.

Allerdings verlaufen diese Schienen um das erhöhte Beet herum, und machen es so schwer zugänglich. Damit die Schienen fehlerfrei funktionieren, müssen sie aufgrund ihrer geringen Fehlertoleranz frei von Schmutz sein und auf einem ebenen Beet verlaufen. Es handelt sich also um kostenintensive Präzisionstechnik, deren Vorzüge der FarmBot nicht nutzt, und deren Nachteile umso offensichtlicher werden.
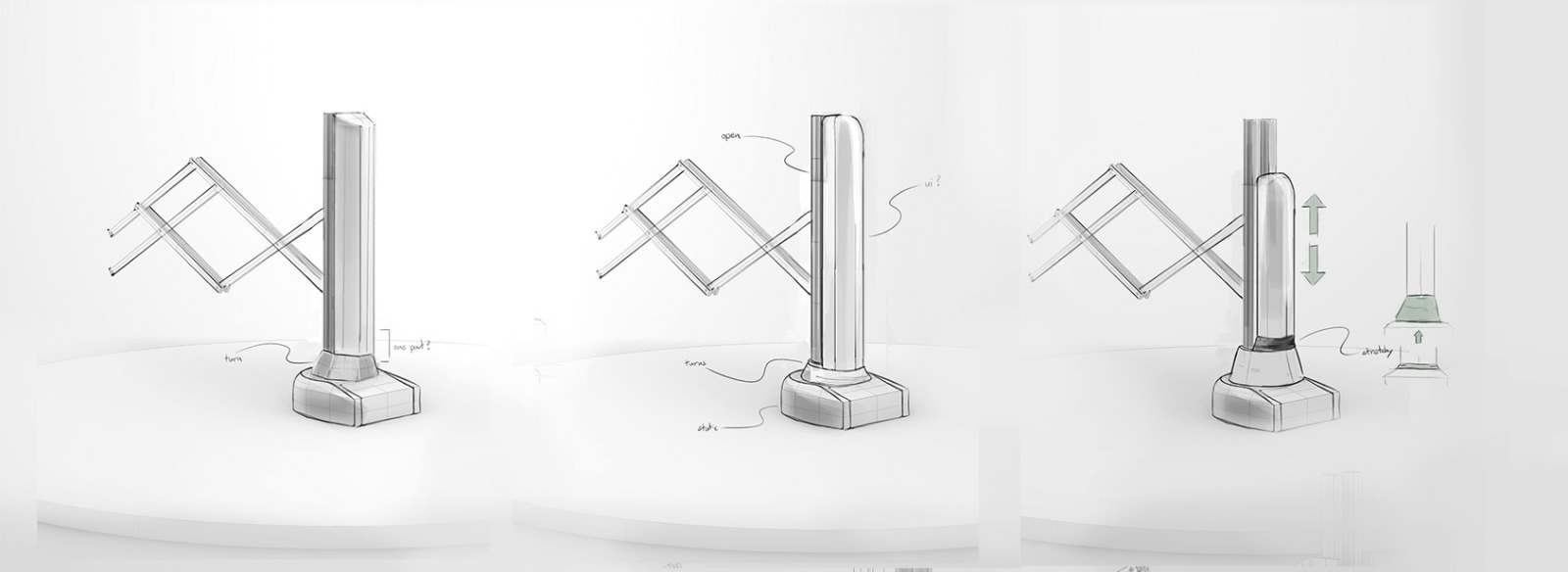
Wir sind der Meinung, dass das vielversprechende Konzept des FarmBots durch die verwendete Schienentechnik sein Potential verspielt. Wir wollen durch eine Reduktion technischer Komplexität den Nutzen des Farmbots beibehalten, aber seine Kosten senken und seine räumliche Präsenz im Garten dezenter gestalten. Nach einer Vielzahl verworfener Ideen erkannten wir, dass für die meisten Anwendungen keine Bewegungen in allen drei Achsen nötig sind. Wenn wir von einer konstanten Höhe des Kopfes ausgingen, könnte die Beweglichkeit des Roboters auf zwei Freiheitsgrade verringert werden, und die Bewegung entlang dieser zwei Freiheitsgrade könnte ohne Weiteres durch einen zentralen, dreh- und ausfahrbaren Arm vollbracht werden.
Prototyping
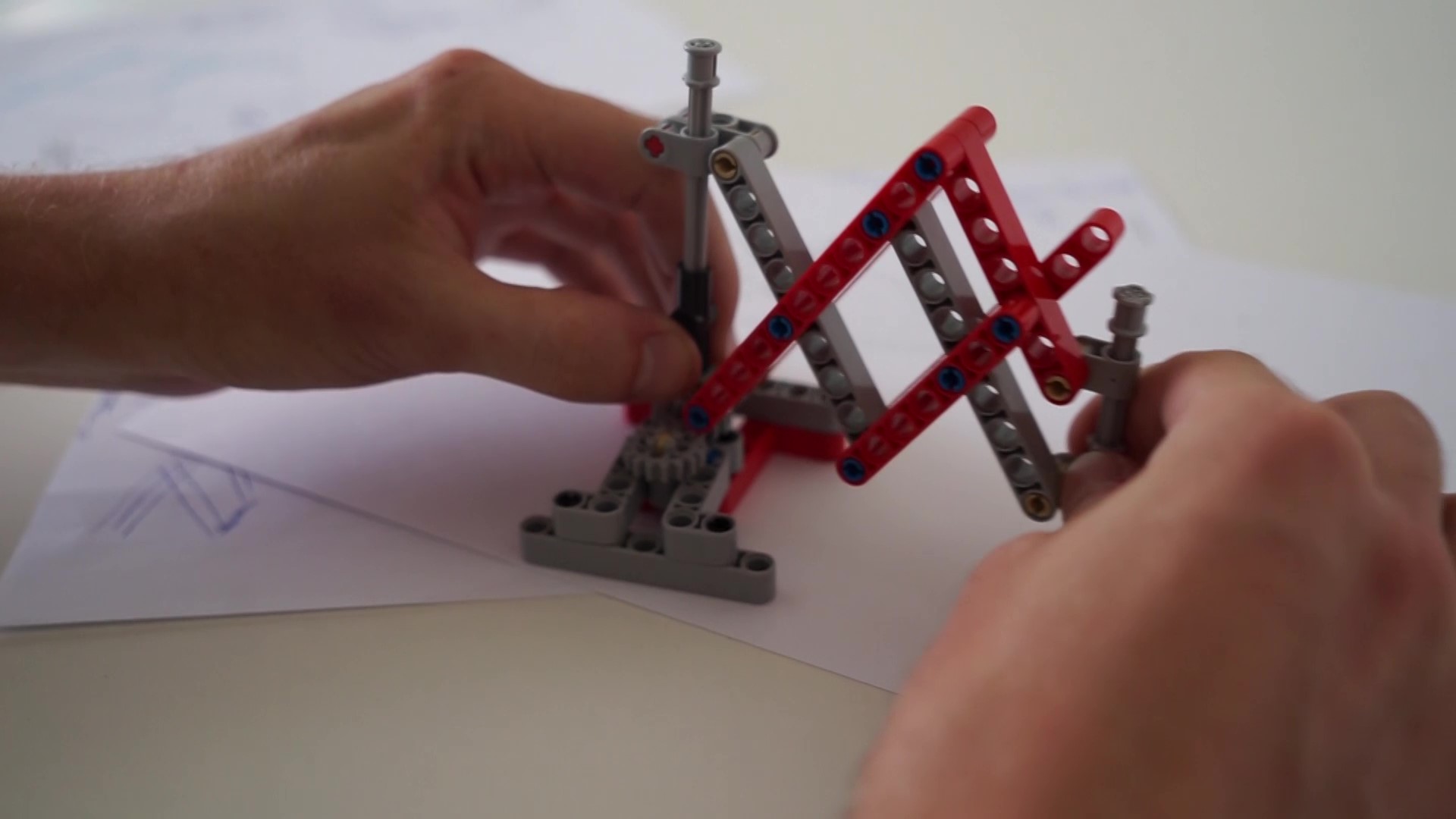
Entsprechend unseres Konzeptes fertigten wir erste Prototypen aus Lego und Papier an, bevor wir uns mit dem Bau des Funktionsprototypen auseinandersetzten. Dieser sollte die Grundfunktionen des Anfahrens einer bestimmten Position und das Gießen beherrschen.

Für eine schnelle erste Umsetzung griffen wir auf Workarounds zurück, wie etwa auf die Verwendung eines Achszapfens mit zugehöriger Bremsscheibe für die Drehachse des Roboters. Die Aktionen des Roboters werden in unserem Prototypen von einem Arduino gesteuert, der mittels Bluetoothverbindung Aufgaben erhält. Die dazu nötigen Informationen kommen dabei aus einer eigenen Datenbank, in welcher alle Pflanzen, deren Position und weitere Eigenschaften gespeichert sind.
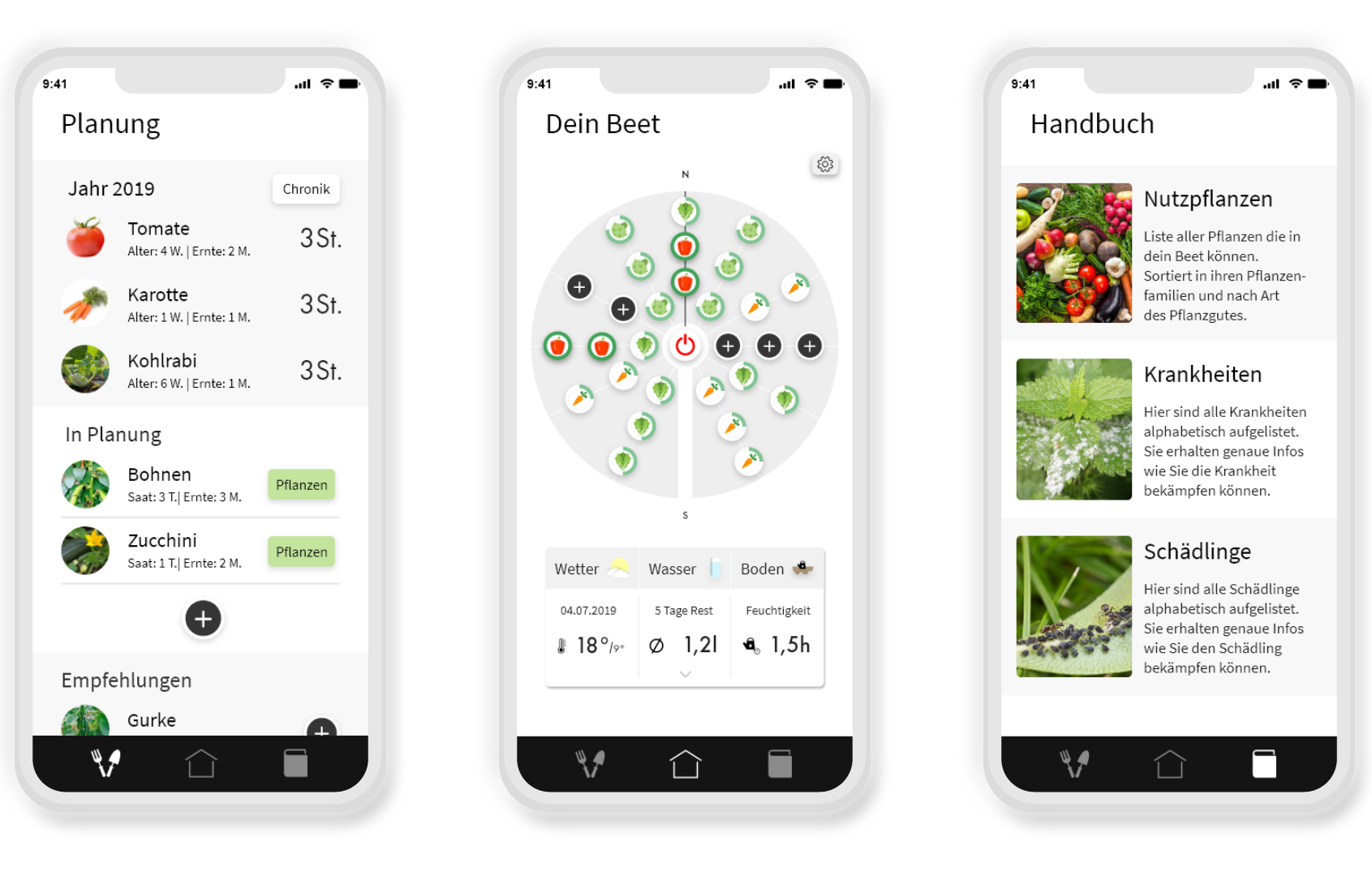
Zusätzlich zu dem Prototypen des Roboters gestalteten wir prototypisch ein Interface in Form einer Smartphone App, über die der Nutzer Kontrolle über den Anbauprozess erlangen und nötige Informationen einsehen kann. Mit wichtigen Funktionen, vom Anlegen des Beetes über die Kontrolle der aktuellen Pflanzenzustände bis hin zur Ernteempfehlung, soll dem Nutzer hier ein sorgloses und angenehmes Anbauerlebnis ermöglicht werden.
Maurice Rio, Fabian Bauer, Andreas Dassler, Alexander Stiegeler
BetreuungProf. Franz Biggel, Prof. Michael Schuster, Benjamin Thomsen
VeröffentlichungSommersemester 2019
Tags